








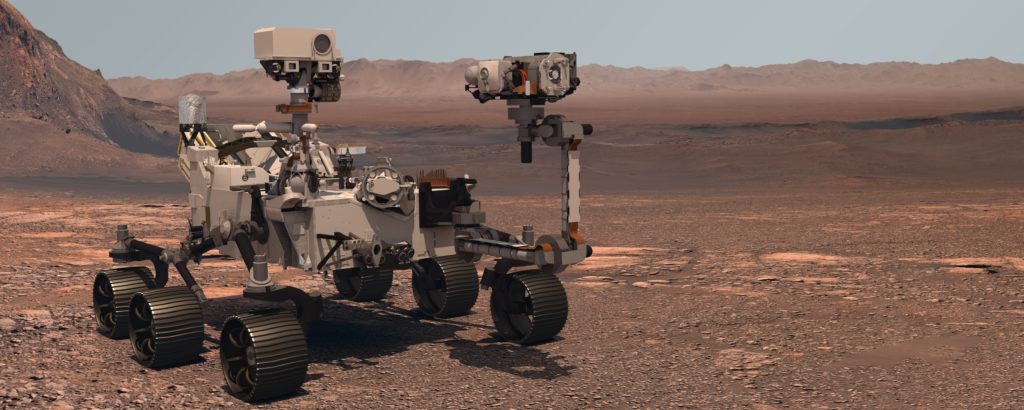
Una delle immagini più classiche della conquista dello spazio da parte dell’uomo è quella dei robot esploratori, i rover, che attraversano paesaggi lunari o terreni insidiosi su Marte scattando fotografie e raccogliendo dati.
Spesso però risulta difficile - se non impossibile - controllare questi robot dal nostro pianeta, per cui è necessario che abbiano elevati margini di autonomia.
Il progetto ADE (Autonomous DEcision Making in very long traverses), nato all’interno del programma europeo Horizon 2020, ha recentemente affidato all’Università del Salento il compito di rendere i rover capaci di compiere scelte da soli (senza indicazioni dell’uomo) a seconda delle condizioni che si trovano ad affrontare.
Il Prof. Giulio Reina e il suo team di ricercatori di Meccanica Applicata hanno già definito l’obiettivo di assegnare ai robot esploratori una determinata meta di interesse scientifico e far sì che il loro sistema di guida sia in grado di scegliere autonomamente la strada migliore per giungere a destinazione con facilità e senza riscontrare incidenti. Questo significa che i rover dovranno evitare durante il percorso qualunque tipo di
intralcio e superfici ostiche, impervie o irregolari, anche lungo tratti di diversi chilometri al giorno.
L’isola di Tenerife è la meta scelta per i primi test pratici: qui il suolo presenta numerose analogie con la superficie di Marte.
